Ultrasanfte Starts und lineare Stopps
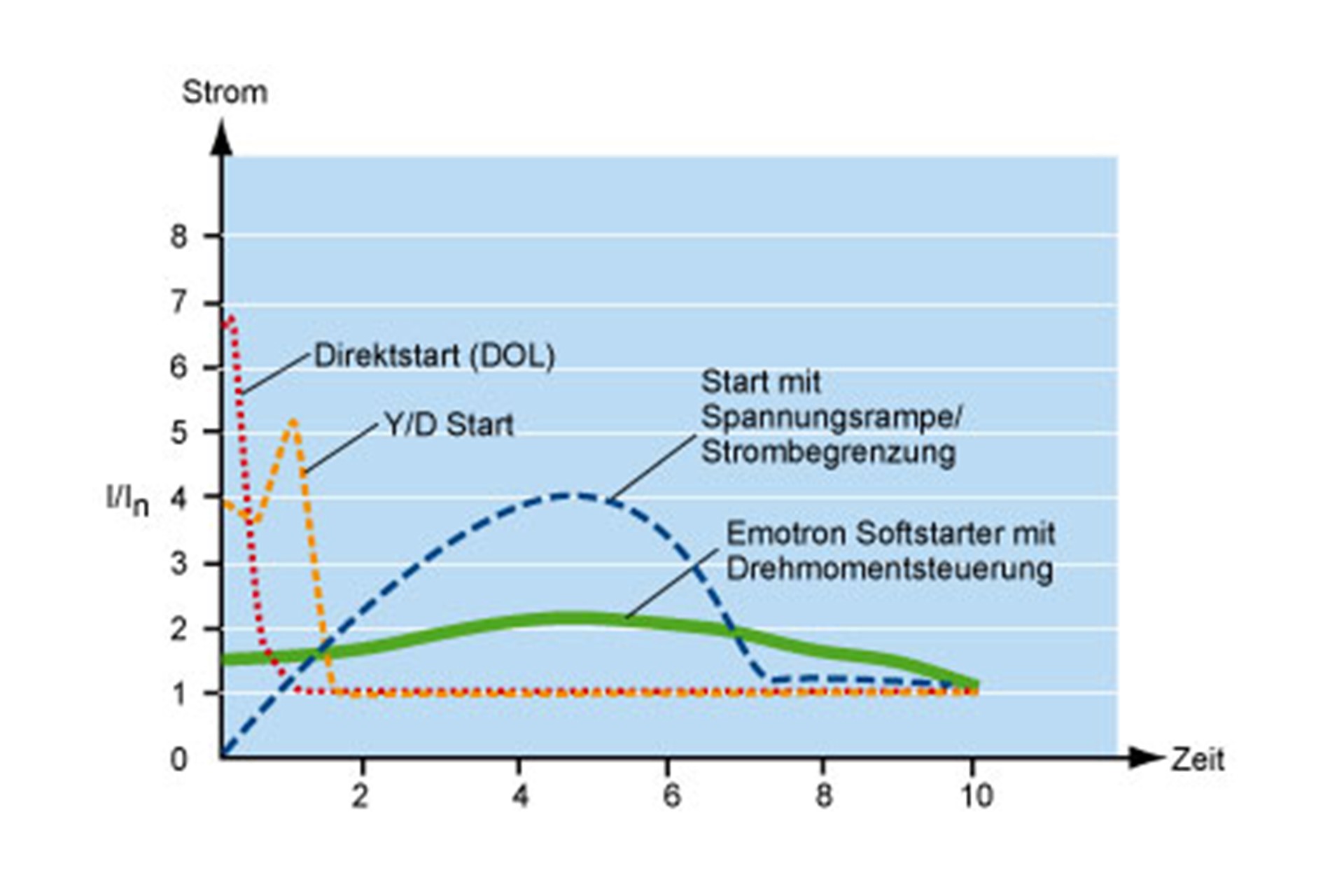
Der erste Emotron-Softstarter wurde 1983 eingeführt. Die Drehmomentsteuerungstechnik wurde 1999 von uns auf den Markt gebracht. Sie hat zusätzlich verringerte mechanische und hydraulische Beanspruchungen sowie konstante Beschleunigungs- und Verzögerungsraten zur Folge.